
به سوی آینده
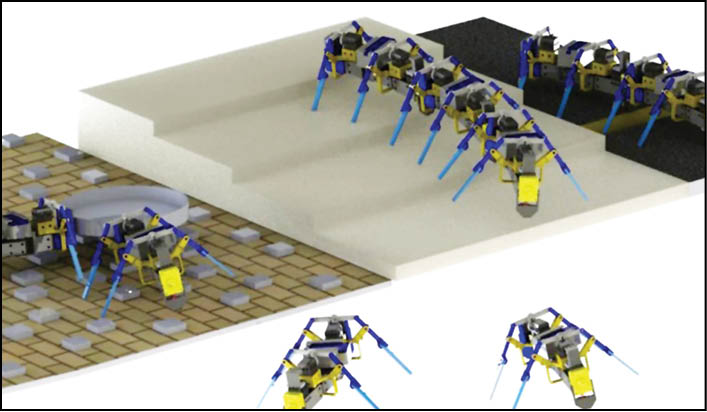

اگر مورچهای برای رسیدن به غذا با یک شکاف بسیار بزرگ روبهرو شود که خودش بهتنهایی نتواند از آن عبور کند، گاهی به مورچههای دیگر علامت میدهد تا پلی از بدنهای متصل بهیکدیگر ایجاد کنند تا راه برای رسیدن به هدف میسر شود. به گزارش نیواطلس، چنین رفتاری هماکنون در یک روبات کوچک چهارپا کپی شده که ممکن است روزی الهامبخش روباتهای جستوجو و نجات باشد. روباتهای چهارپا قطعا دارای مزایایی نسبت به همتایان چرخدارشان هستند؛ ازجمله اینکه میتوانند هنگام عبور از زمینهای ناهموار، از موانع بالا بروند و بر آنها غلبه کنند. بنابراین تصور میشود که ازدحام مشترک اینگونه روباتها در نهایت میتواند در برنامههایی مانند جستوجوی بازماندگان یک فاجعه مورد استفاده قرار گیرد. با این حال، حتی روباتهای پادار را میتوان با شکافهای عمیق یا موانعی که برای صعود بسیار شیبدار هستند، متوقف کرد. با درنظر گرفتن این محدودیتها، پروفسور یاسمین اوزکان - آیدین، معاون دانشگاه نوتردام مجموعهای از روباتهای چهارپا با چاپ سهبعدی ساخته است که میتوانند با همکاری یکدیگر از چنین چالشهایی عبور کنند. طول هر یک از این روباتها، 15تا 20سانتیمتر بوده و شامل یک باتری لیتیوم پلیمر، یک ریزپردازنده، یک حسگر نور نصب شده در جلو، به علاوه یک حسگر لمسی مغناطیسی در جلو و دیگری در عقب است. هنگامی که روبات در معرض آیتمهای آزمایشی قرار گرفت، بهصورت بیسیم یک سیگنال به دیگر روباتهای مجاور خود ارسال کرد. به محض ورود این روباتها، آنها از حسگرهای لمسی مغناطیسی خود برای تعیین جهت نسبت به یکدیگر و پیوند بدنشان در یک زنجیره استفاده کردند. به این ترتیب، آنها میتوانند یک پل عبور از شکاف یا یک قطار صعود از موانع را تشکیل دهند. بهعلاوه آنها حتی میتوانند با یکدیگر برای حمل اشیای بیش از حد بزرگ یا سنگین همکاری کنند. اوزکان - آیدین هماکنون روی بهبود حساسیت، قابلیتهای مشترک و قدرت باتری سیستم روباتیک ازدحام خود کار میکند. همراه با استفاده از آن در عملیات جستوجو و نجات، در نهایت ممکن است در برنامههایی مانند اکتشاف فضا، نظارت بر محیطزیست یا برای مطالعه پویایی جمعی حشرات مانند مورچهها و موریانهها مورد استفاده قرار گیرد.

